

REAL TIME VISUALIZATION

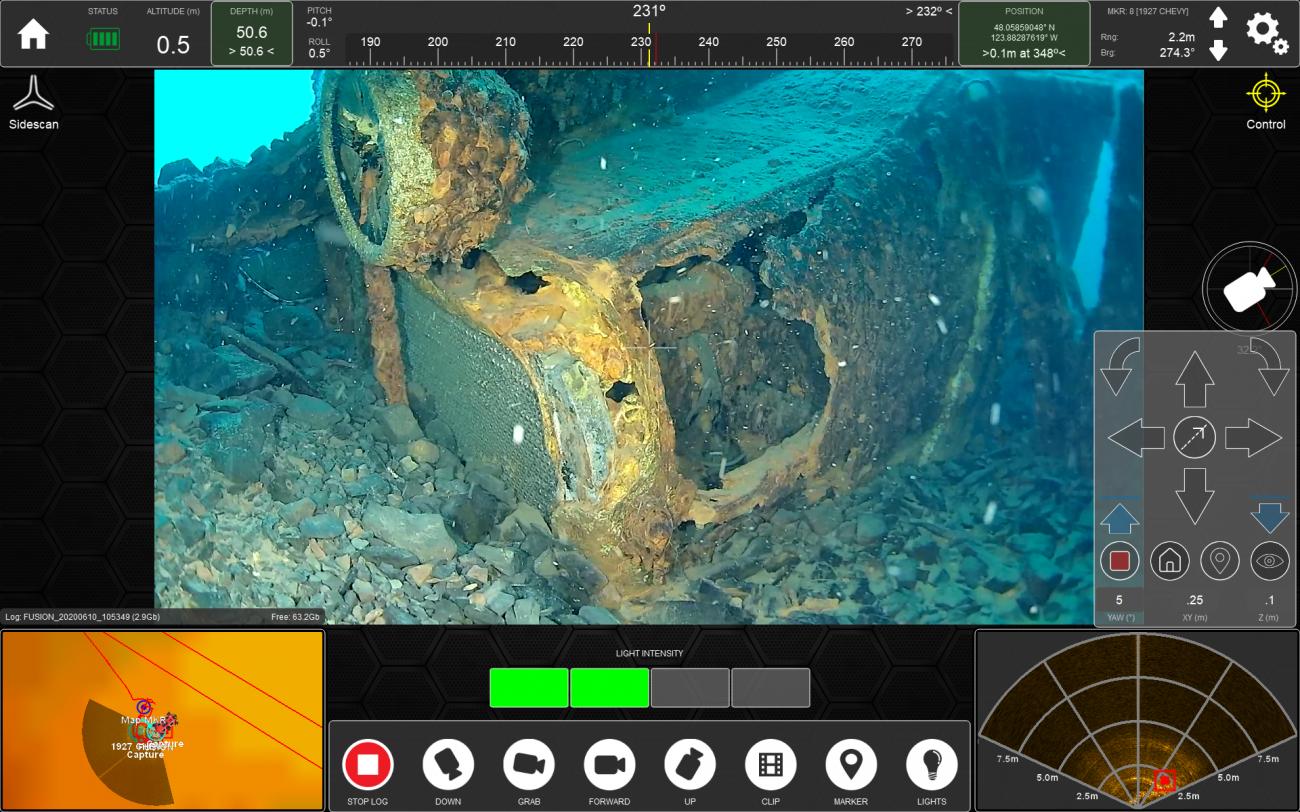
The FUSION vehicle is equipped with a variety of key sensors that provide valuable real time data for the operator during demanding missions. Position, sonars and video are all displayed cleanly to assist the operator. Each sensor can be prominently displayed by simply tapping on the corresponding window and reducing the other sensor data to minimized windows.
When a sensor is dominant the function buttons correspond to the sensor. For example in sonar mode the buttons control range, gain, measure, frequency and waypoint placement. In video mode the function buttons control the camera tilt presets and lights.
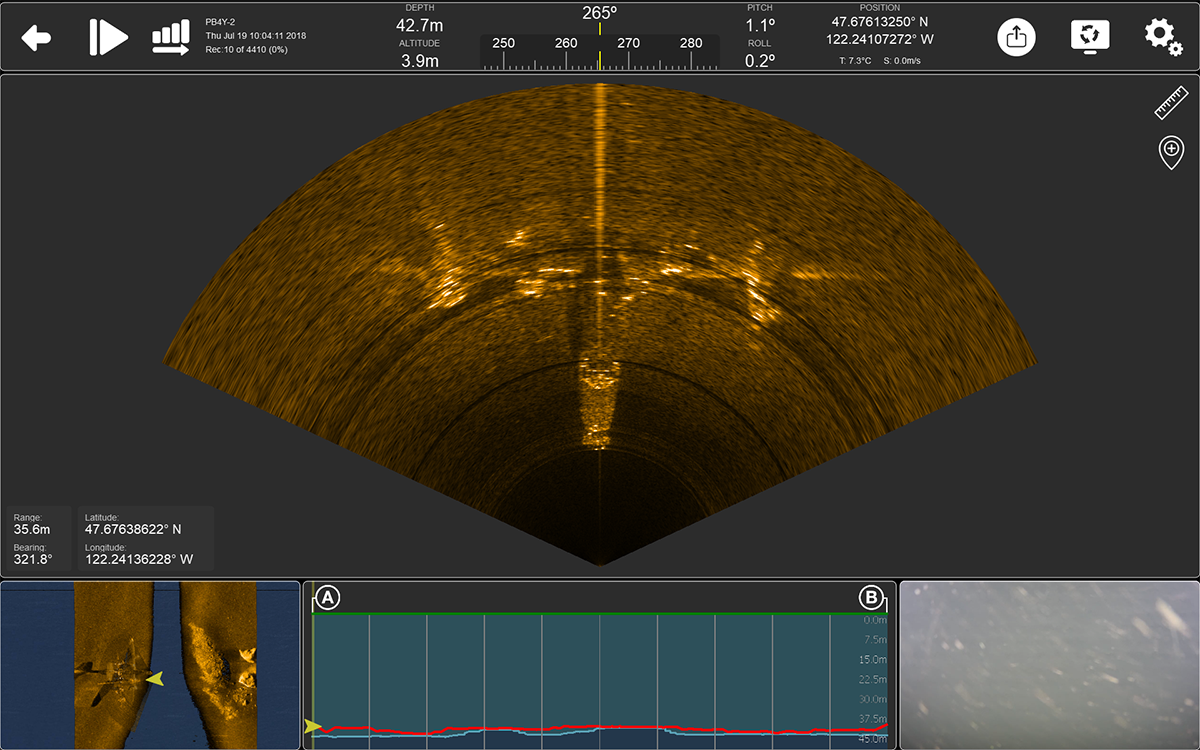
FORWARD LOOKING SONAR (FLS)
The FLS processing enhances the hardware by producing a higher image quality that is unique to FUSION. With FLS dominant in the user interface operators can adjust range, gain, mark targets, measure, zoom and switch frequency. When a marker is selected it will be visible in the FLS window.
Additional FLS functionality includes:
- 16 bit mode - higher data and image resolution. User selectable in Settings.
- Pinger Locator - FUSION combined with the FLS is able to detect a pinger at a range of approximately 500m (1,650ft), triangulate a location and navigate to.
VIDEO
The HD video feed is viewable in the user interface along with various camera controls. Operators are able to use presets for camera tilt, manually tilt camera, place a marker at FUSION’s location as well as configure camera settings. When fitted with a secondary camera picture in picture (PIP) is possible.
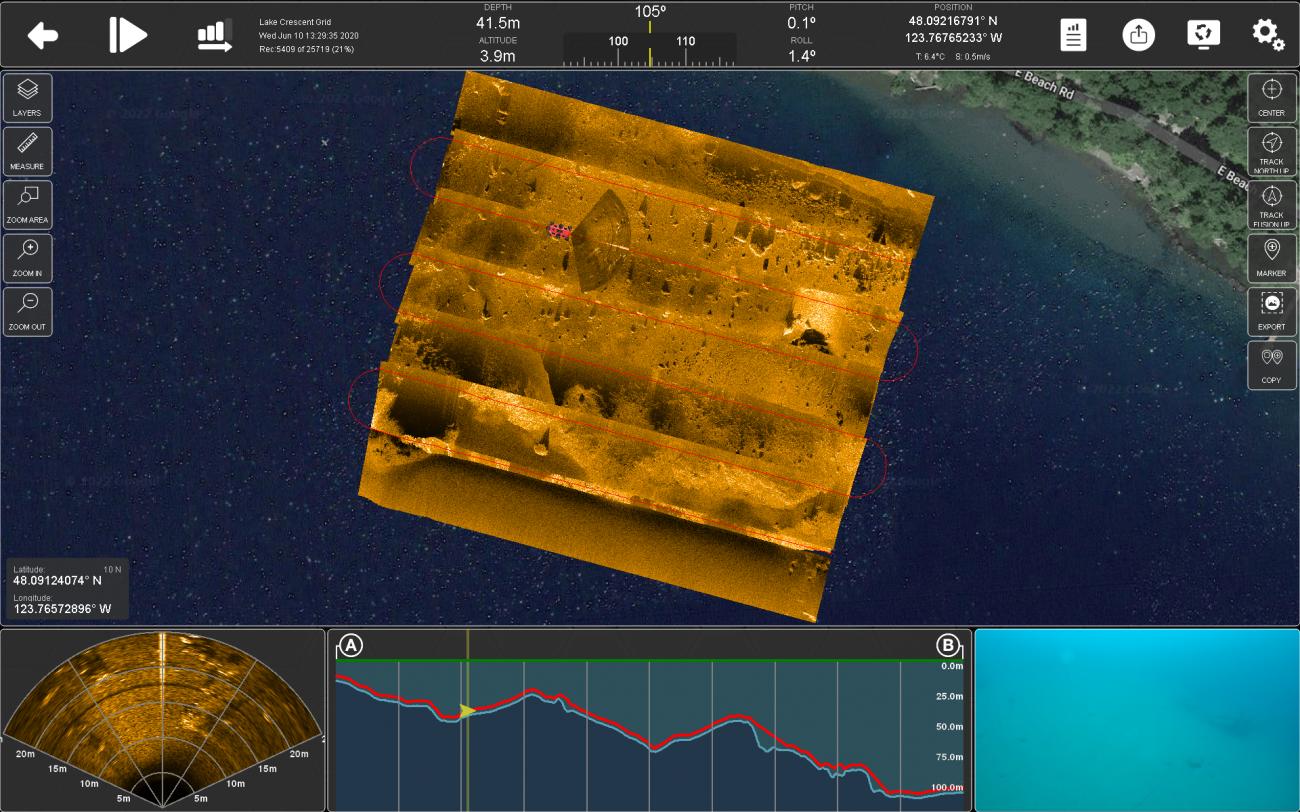
SIDE SCAN SONAR (SSS)
The SSS display provides a real time waterfall display with controls for range, pausing, marking targets and imagery adjustments. When enabled the SSS data is also put into a mosaic in the navigation screen.
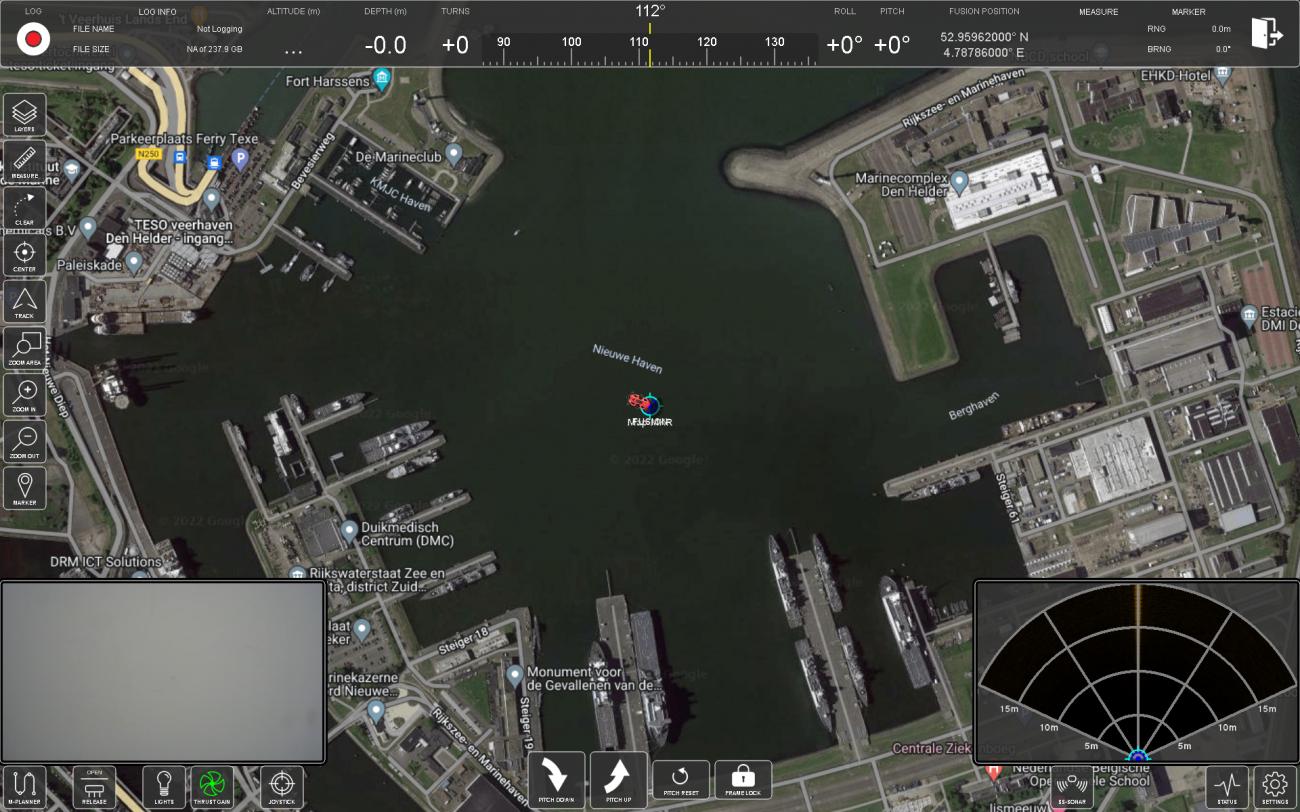
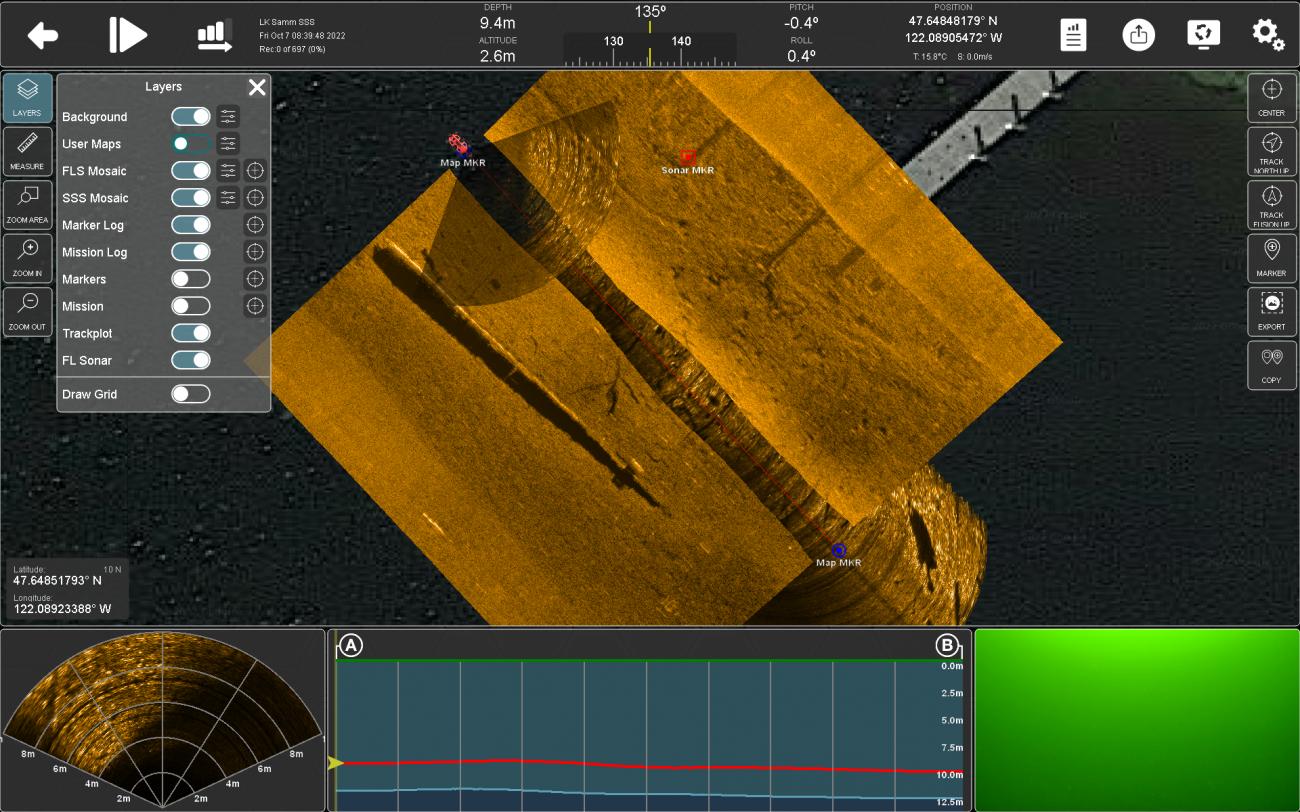
NAVIGATION
When the navigation screen is maximized operators can intuitively monitor FUSION’s position as well as display various real time data mosaics. The navigation screen offers the ability to load various base maps including satellite imagery, electronic nautical charts (S57 & S63), GeoTIFFs, KMZ files, side scan sonar mosaic files, forward looking sonar mosaic files and GPX files. Also viewable in the navigation screen are markers (either placed or imported from files such as COIN).
Additional tools include zoom, center over FUSION, north/track up, measure and place marker. View examples of the different screen displays in ROV mode.


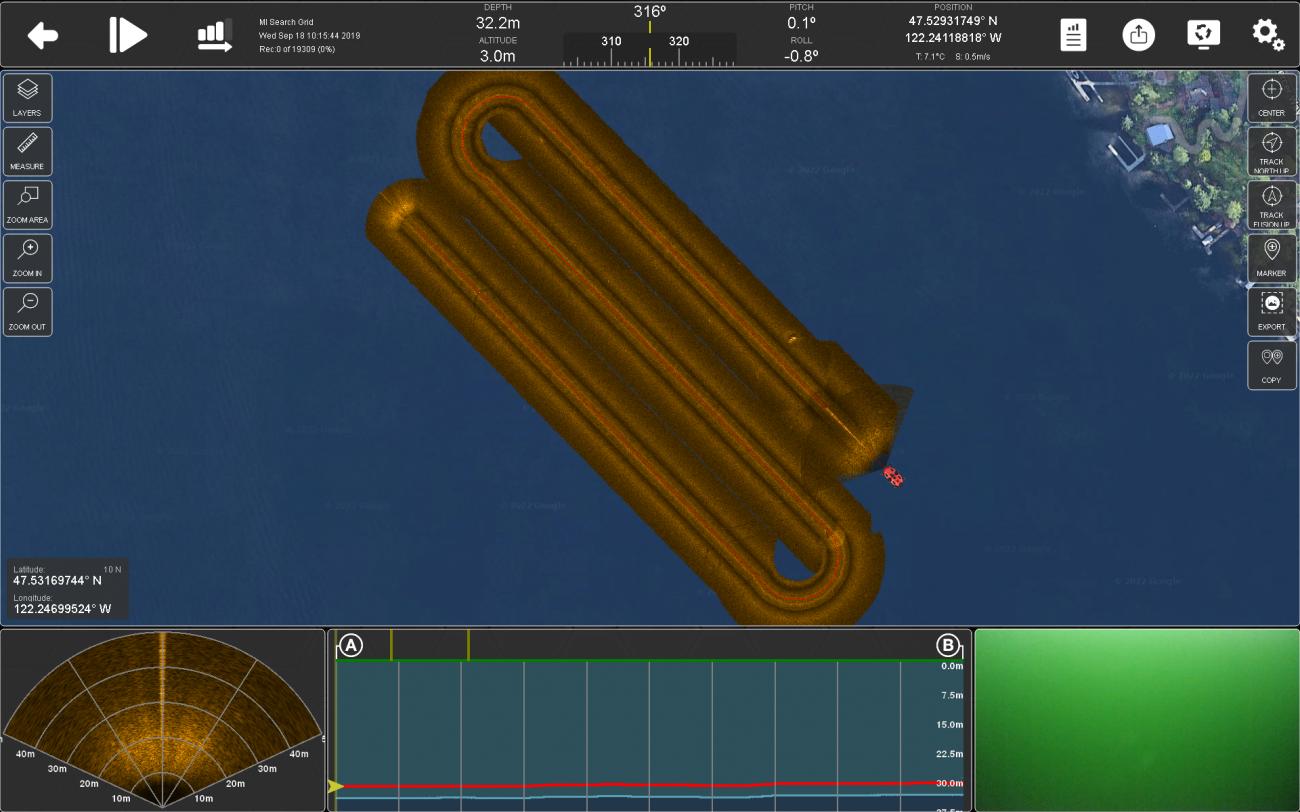
MISSION PLANNING
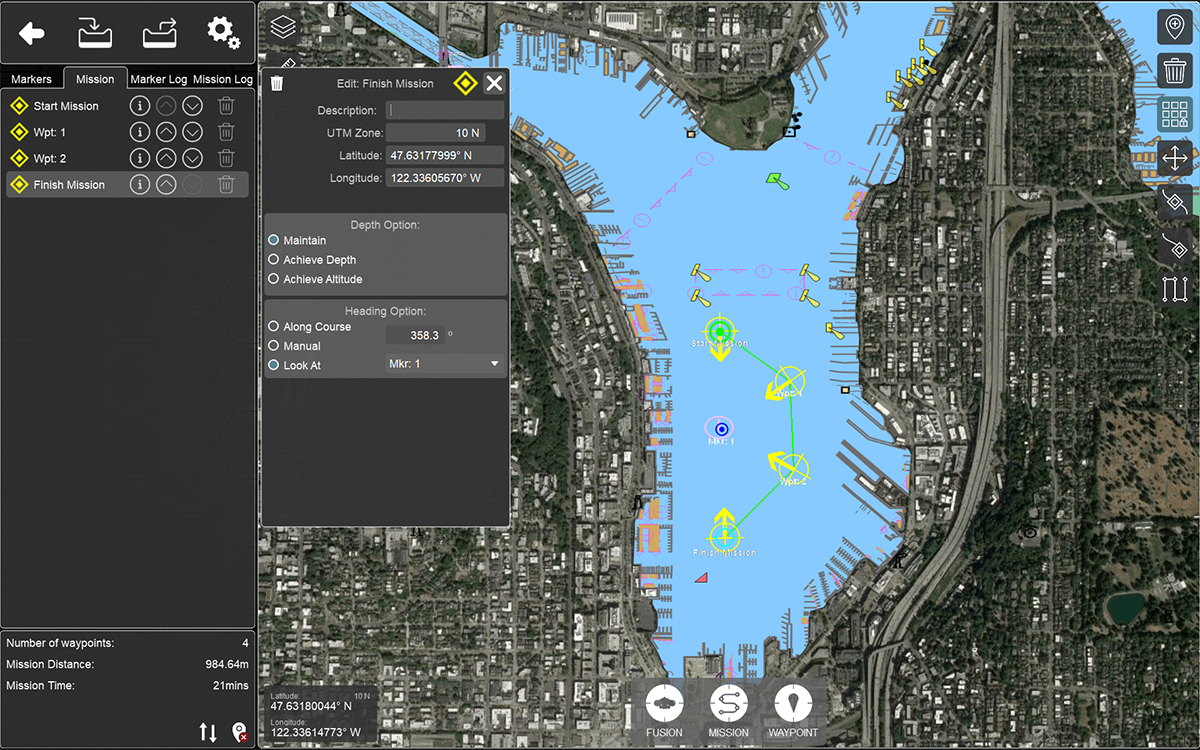
Whether operating in AUV mode or ROV mode the intuitive mission planner allows operators to intuitively create infinite number of mission plans. In ROV mode the mission planner is easily accessed to create grid patterns, custom designed paths or simple go to and stop markers. For AUV missions the same planning is possible, but with the added selection of what sensor data to collect (video, forward looking sonar, side scan sonar).
Missions can be exported or saved for future use as well as externally created missions can be imported. With the same useful navigation screen tools such as chart underlay, side scan mosaic layers operators can carefully plan missions according to the data on screen.
Planning missions are not restricted to simple grid patterns (although the useful tool is included), but rather can be created in complex shapes. Since FUSION is a vectored vehicle missions can be designed with different heading angles, look at, orbit marker, drop payload, altitude adjustments, velocity variations and more. The simple to use interface provides all the tools to design missions to suit various requirements.
TARGET CLASSIFICATION

The FUSION user interface includes a comprehensive classification tool that enables operators to assign properties to any collected marker/target. When a marker is placed from any of the various methods (FLS, SSS, Video, Nav) a window appears that automatically is populated with relevant information such as depth, position, heading, etc. Additionally, operators can manually input a variety of information such as measurements, name, object type and full NATO classification notes. All notes are stored with the marker and outputted along with a thumbnail image in the report generator.
DATA REPLAY
When logging all data is stored into a single .fusion file for seamless replay. The replay window closely resembles the real time display with the addition of useful tools such as depth profile, replay slider, export functions, trim and more. During replay it is possible to adjust the navigation screen layers, import data from other log file and adjust the replay speed.
There are a number of tools available in replay:
TRIM
Ability to shorten files and export relevant content including subsets, video or sonar data.
EXPORT
Export different formats of data from a .fusion file including video, side scan sonar XTF, vehicle data, GeoTIFF images, KMZ files and third party sensor data.
REPORT GENERATOR
An automated report generator that produces a PDF document based on markers collected in the log file or placed in post analysis.
COPY MARKERS TO LIVE MISSION
Markers can be copied from log files to live missions.
MORE FUNCTIONS

The user interface is so comprehensive it is difficult to describe every feature. More examples of included features are:
- System Settings - easy to access settings for salinity, GNSS setup, coordinate system, sensor firmware versions, hardware joystick calibration, automated compass calibration and more.
- System Status - full vehicle diagnostics including thruster information, battery information, GNSS satellites, vehicle history (downloadable), DVL diagnostics, network information and more.
- Acoustic Communications - send messages to FUSION in AUV mode or message divers.
- Support - full operators manual, quick start guide and tutorial videos.
- Vehicle Attitude - pitch, roll graphical interface and numerical values.
- 5 Function Model - view in real time position of 5 function manipulator arms on FUSION.
